My 2023-2024 Project
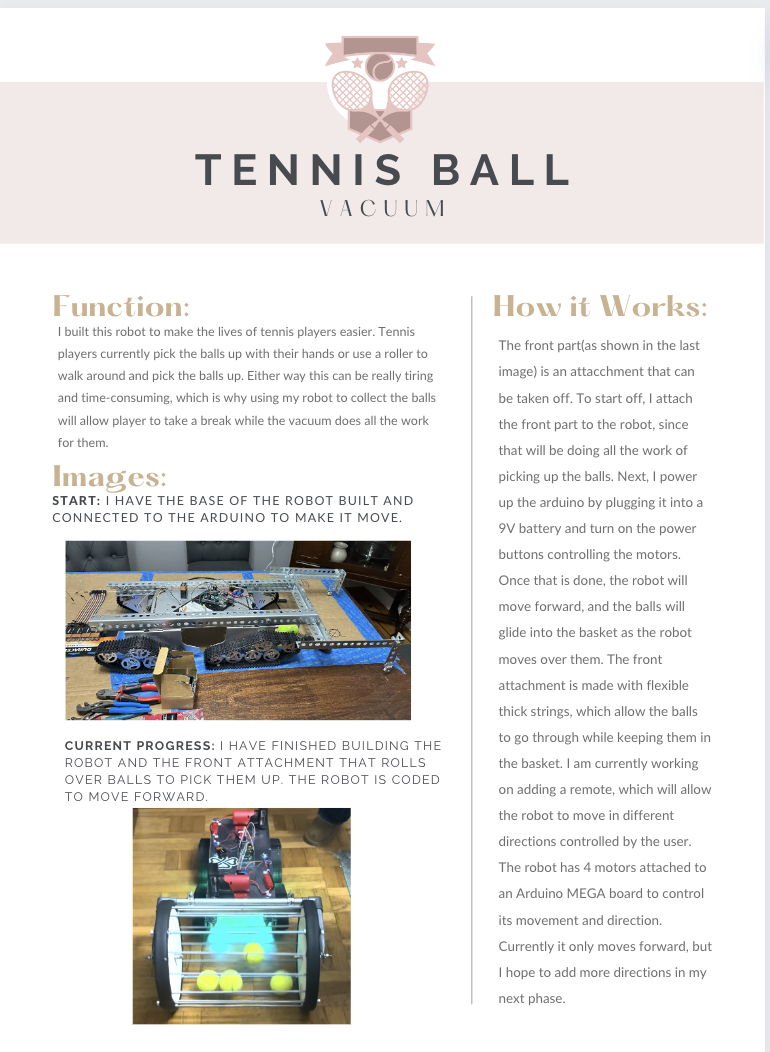
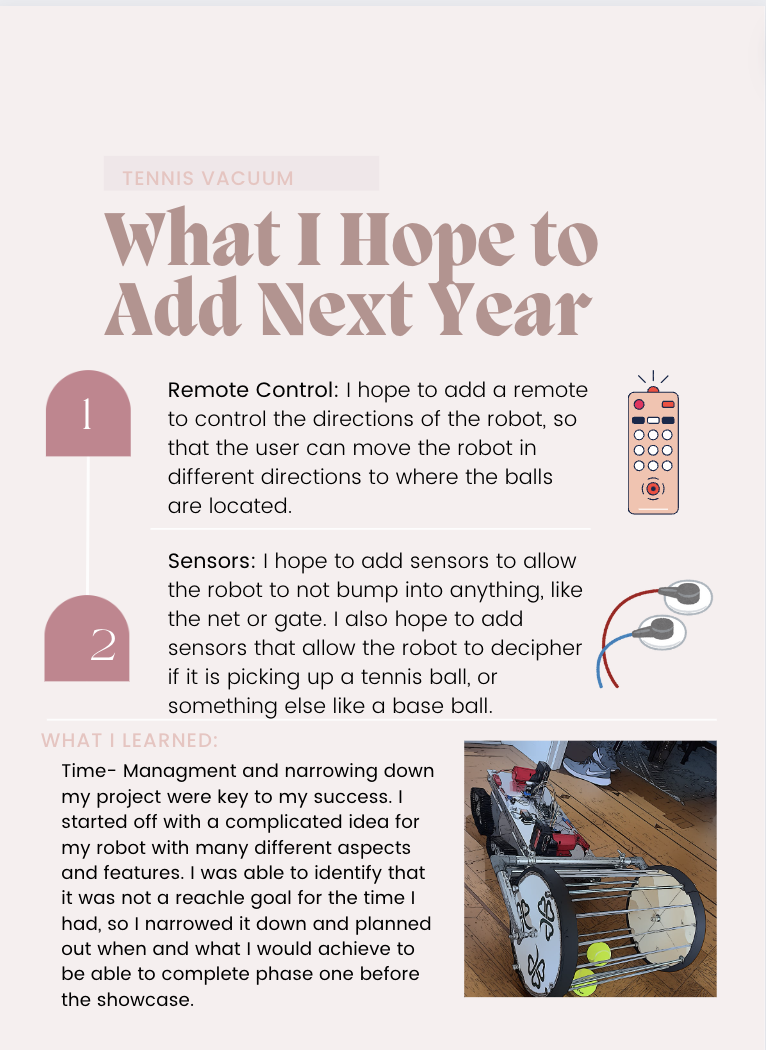
My project this year will revolve around the theme of sports, more specifically the sport of tennis. As a tennis player myself, I know how tiring and frustrating it can be to have to pick up, what seems like hundreds, of tennis balls scattered across the courts after you finish the basket of balls. This year, I have chosen to help out the tennis community by addressing the problem of having to waste time and effort running around to gather these tennis balls. This is a serious problem for tennis players and in response, my project will make it easier for tennis players to gather their balls faster so that they can allocate more time to playing the sport rather than picking up balls. Now how am I going to address this problem with my project this year? I have decided to create a robot that works like a vacuum. This machine will be controlled by a remote and it will move around the courts to gather the balls while you take a water break or rest before getting back to your game. While you might be thinking, isn’t there already stuff like this out there? While there is, none of the already created inventions can physically move around and gather the balls by themselves. All of the other machines require you to physically walk around with them, which defeats the whole purpose of allocating less time to picking up balls. I was inspired by my passion for tennis and my hatred for picking up hundreds of balls every 10 minutes at practice but also received inspiration from some of my friends in my computer science class. The biggest challenge so far is finding where to order all the necessary parts for this machine, but with the upcoming breaks and weekends, I have dedicated time and research to getting this checked off my list so that I can get ready to assemble it. I have successfully built the base of my robot, connected it to an Arduino board to control the motors, and tested it. It is currently able to move forward and pick up 10-20 tennis balls(the biggest amount I have tested). I am hoping to continue this next year, adding a remote control to move the robot in different directions and sensors.